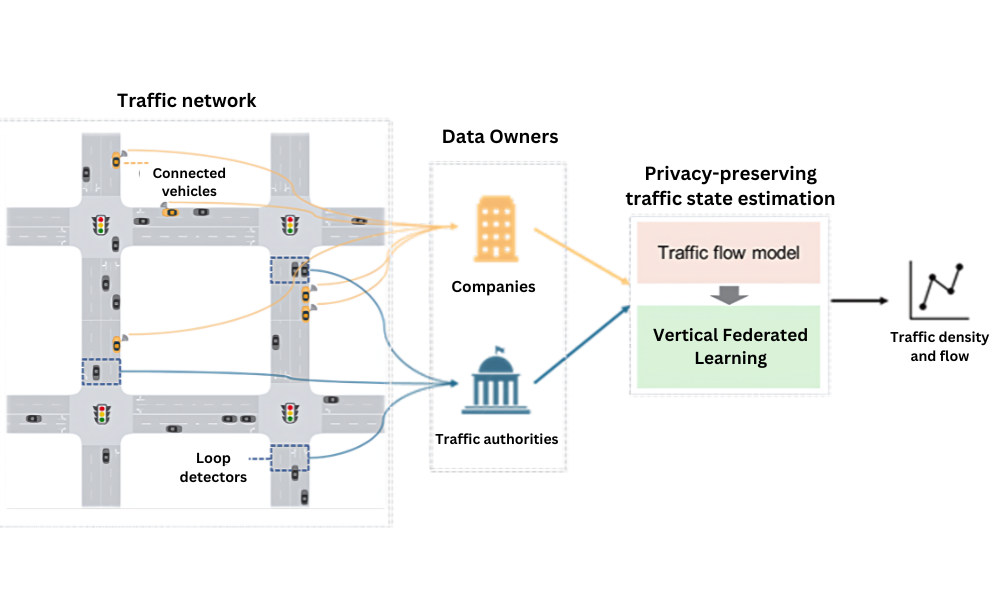
The aim is to develop a privacy-preserving data fusion algorithm for traffic state estimation that accurately estimates key traffic states such as flow, density, and speed for better traffic operations while safeguarding the privacy of mobility companies that provide the trajectory data.
To achieve this, the researchers first utilize the promising framework of FL, which enables multiple parties to collaboratively train a model without exchanging private data. The researchers formulate the traffic state estimation problem as a vertical FL problem and build their algorithm on a recently developed framework, reducing communication overhead through local gradient updates and easily integrating with graph neural networks.
Next, the researchers proposed a physics-informed FL approach that integrates traffic models with FL to improve data efficiency. This ensures the applicability of the proposed FedTSE in common traffic state estimation scenarios with limited ground-truth availability. Physics-informed deep learning integrates physical models into learning-based approaches to improve the data efficiency in the training process and/or to preserve the desired physical properties of the trained models.
Vertical federated learning: It enables data fusion between two entities without the need to disclose their raw data.
Traffic flow modelling: It ensures that the estimated traffic states satisfy key constraints defined by traffic flow dynamics.
HPC resources: This project was allocated 3,000 GPU hours from NSCC Singapore to train their models.
Case studies demonstrated that the models developed by the researchers can preserve the privacy of data owners with minimum impact on estimation performance, significantly outperforming baselines where mobility companies only share partial or no data due to privacy concerns. Moreover, by protecting privacy, mobility companies can be more incentivized to participate actively in data fusion and use higher-resolution data, thereby enhancing estimation accuracy.
On the practical side, the proposed strategy can help eliminate the data silos in the transportation industry by promoting collaboration between stakeholders, allowing them to share data safely and trustfully.